

多功能机械系统创新组合搭接综合实训装置的实验步骤是专门为用户解决疑难问题的,非常具有代表性,在客户进行产品选型前,我们一般建议用户先看下多功能机械系统创新组合搭接综合实训装置的实验步骤。这样能对用户选型有非常大的帮助。
一、实验准备
在进行多功能机械系统创新组合搭接综合实训之前,需要做好充分的准备工作。首先,学生需要了解实验的基本原理和概念,熟悉多功能机械系统的特点和组合方式。其次,学生需要准备好实验所需的易游网页版,易游(中国)和工具,如机械零件、螺丝刀、扳手等。同时,学生还需要阅读实验指导书,了解实验步骤和注意事项。
二、实验步骤
机械零件的认知与选择
在实验的开始阶段,学生需要了解实验装置中提供的各种机械零件的名称、特点和用途。这些零件包括齿轮、轴、轴承、连杆、滑块等,每种零件都有其特定的运动特性和应用场景。学生需要根据实验需求,选择合适的零件进行组合和搭接。
机构创新组合设计
在了解了各种机械零件的基础上,学生需要发挥创新思维,设计出不同的机构运动组合。学生可以根据自己的兴趣和需求,设计出具有特定运动轨迹和功能的机构。在这一过程中,学生需要综合考虑零件的尺寸、运动范围和运动特性等因素,以实现最佳的运动效果。
搭建和调试机构运动组合
在完成创新组合设计后,学生需要利用实验装置中的机械零件搭建出所设计的机构。在搭建过程中,学生需要注意零件的安装顺序和连接方式,确保机构的稳定性和可靠性。完成搭建后,学生需要对机构进行调试,检查各部分是否能够正常工作,并调整机构的运动轨迹和速度等参数,以满足设计要求。
传动系统设计与搭接
在完成机构运动组合的搭建后,学生需要设计和搭接传动系统。根据机构的需求和运动特性,选择合适的传动方式(如齿轮传动、带传动等)和传动元件(如齿轮、带轮等)。然后,将传动元件与机构连接起来,形成完整的传动系统。在这一过程中,学生需要考虑传动效率、稳定性以及安装和调整的便利性等因素。
控制系统设计与调试
为了实现机构的精确控制和协调运动,学生需要设计和调试控制系统。根据机构的需求和运动特性,选择合适的控制器(如PLC控制器、单片机等)和传感器(如光电传感器、限位开关等)。然后,编写控制程序或配置控制参数,使机构按照预定的轨迹和速度进行运动。在这一过程中,学生需要考虑控制精度、响应速度以及安全保护等因素。
综合调试与性能评估
完成机构、传动系统和控制系统的设计与搭接后,学生需要对整个多功能机械系统进行综合调试和性能评估。通过实际运行和测试,检查系统是否能够实现预期的运动轨迹、速度和功能。同时,记录相关的实验数据和结果,如运动精度、稳定性、能耗等指标。根据评估结果,对系统进行必要的调整和优化。
团队协作与交流
在进行多功能机械系统创新组合搭接综合实训时,学生可以分组进行实验。通过团队协作,学生可以共同讨论和交流设计思路、搭建技巧和实验经验。通过相互学习和借鉴,学生可以拓宽自己的思路和知识面,提高团队合作能力和沟通能力。在团队协作过程中,学生应明确分工和任务分配,并积极分享自己的想法和经验。同时,学生还应该注重团队之间的沟通和协调,共同解决问题和克服困难。
整理与总结
完成多功能机械系统创新组合搭接综合实训后,学生需要对实验过程进行整理和总结。这一步骤包括整理实验数据、归纳实验结果、分析问题和解决方案等。通过总结实验经验和方法,学生可以巩固所学知识,提高自己的实践能力和学术水平。同时,学生还可以为今后的学习和实践提供有益的参考和借鉴。在整理总结过程中,学生应注重反思和评估自己的表现和成果,找出不足之处并制定改进计划。此外,学生还可以撰写实验报告或论文,将实验过程和结果以书面形式呈现出来,提高自己的学术表达能力。
三、注意事项
在进行多功能机械系统创新组合搭接综合实训时,学生应注意安全问题。首先,学生应遵守实验规则和操作流程,确保实验过程的安全性。其次,学生在使用机械零件时应小心谨慎,避免零件掉落或飞散伤人。此外,学生在调试机械系统和控制系统时应避免过度用力或操作不当导致机构失控或损坏。最后,学生在团队协作中应保持良好的沟通和协调,避免因意见不合或责任不明确而产生矛盾或冲突。
通过以上步骤的实践和研究,学生可以深入了解多功能机械系统创新组合设计的原理和方法。通过发挥创新思维、动手实践和团队协作能力,学生可以提高自己的机械设计和创新能力。同时,通过实验过程中的观察、分析和总结,学生可以培养自己的实践能力和学术水平。最终,学生将获得宝贵的实践经验和知识储备,为未来的学习和工作奠定坚实的基础。
以下是多功能机械系统创新组合搭接综合实训装置的技术参数
多功能机械系统创新组合搭接综合实训装置技术性能
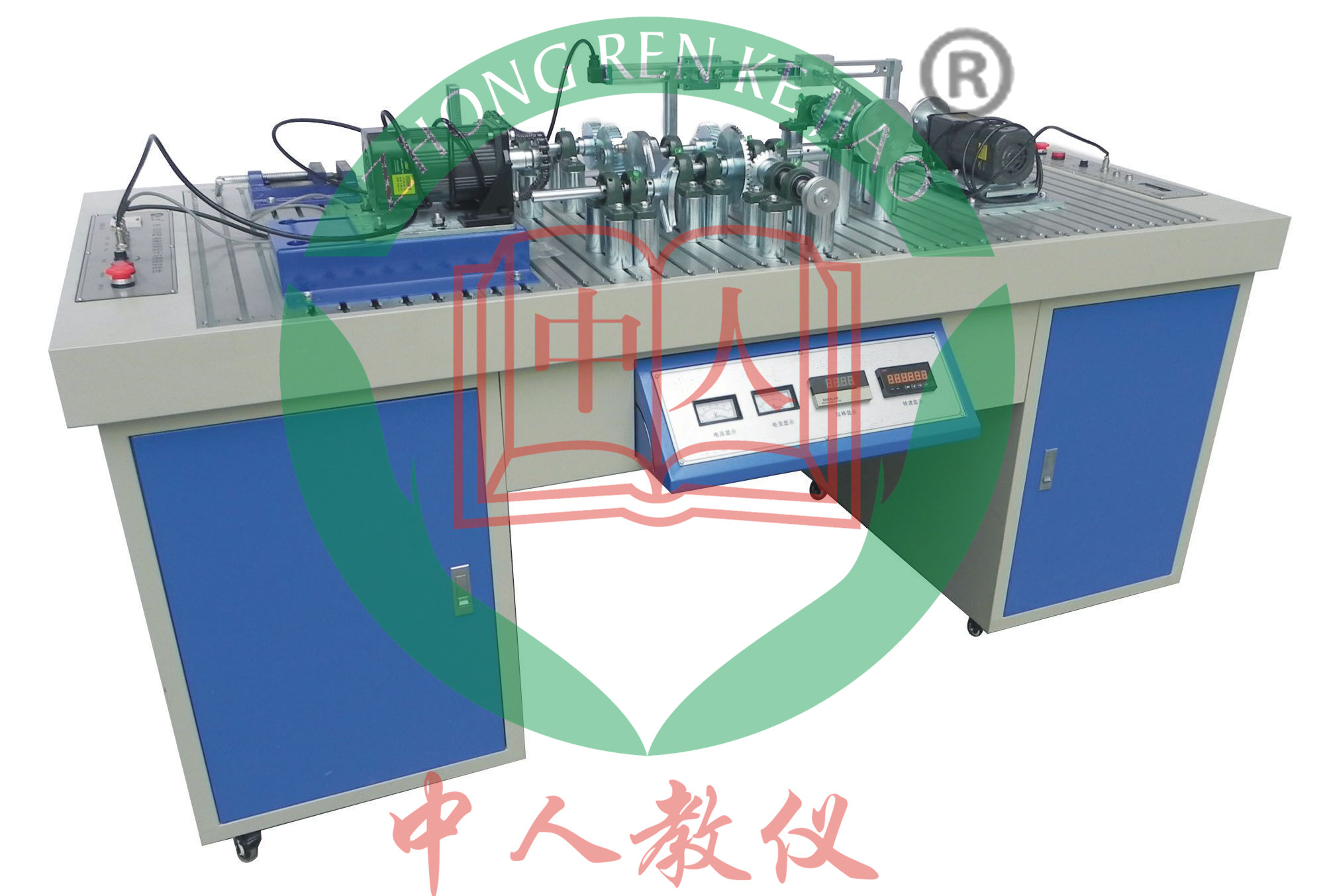
1. 实训台
(1)多功能机械系统创新组合搭接综合实训装置,机械原理实训台采用铁质双层亚光密纹喷塑结构,台面为带“T”形槽的铝合金型材操作面板,设有四个柜子(双层结构),便于存放实训工具和资料
(2)输入电源:单相三线~220V±10% 50Hz
(3)外形尺寸:1850mm×850mm×860mm
2. 零件架
(1)铁质双层亚光密纹喷塑结构,正反两面均可存放实训零件,并设有4个带刹车的万向轮
(2)外形尺寸:860mm×600mm×1600mm
3. 交流电机
4. 电源控制箱
(1) 调速器:提供交流电机调速电源
(2) 数据采集接口:主要包括角度、位移、转速等传感器接口及通讯接口
(3) 设有电流型漏电保护,I△n ≤30mA,动作时间≤0.1s,容量10A
5. 传感器
(1) 旋转编码器:铝合金材质,分度1024脉冲/转
(2) 直线位移传感器:铝合金外壳,量程 200mm,独立线性度 0.1%