焊接机器人工作站实训系统
栏目分类:柔性制造与工业4.0 发布日期:2018-04-08 浏览次数:次
焊接机器人工作站实训系统,焊接机器人实训平台学习如何搭建焊接机器人系统和相关维护排错技能、焊接轨迹在线示教编程、焊接轨迹在线语言编程、焊接轨迹离线编程,咨询13122891392
联系方式见右侧悬浮框
【焊接机器人工作站实训系统,焊接机器人实训平台】是根据客户需求而写的,非常具有代表性,在客户搜索【焊接机器人工作站实训系统,焊接机器人实训平台】时,都能通过我们来了解相关资讯,而且【焊接机器人工作站实训系统,焊接机器人实训平台】在客户有需求时提供参考意见。
ZRJQR-HJ焊接机器人工作站实训系统

一、方案简介
焊接由一台工业机器人、焊接变位机工作台和全数字焊机及配套焊枪、自动送丝机、清枪剪丝站组成,同时工作站可配套一间教学安全护栏或安全房,以及除尘易游(中国),可以在实现教学时保证学生安全和良好的教学环境。该焊接,同时配置了一套轨迹学习模块,用于各种轨迹的练习。通过本焊接机器人工作站,可实现对焊接机器人系统的构成和基本操作的教学,轨迹示教教学。
学习如何搭建焊接机器人系统和相关维护排错技能、焊接轨迹在线示教编程、焊接轨迹在线语言编程、焊接轨迹离线编程,配合变位机工作台实现复杂空间焊接轨迹应用,可在实现基本教学的基础上完成更加综合的教学内容。机械机构采用型材组焊装配结构,具有良好的刚度/重量比,同时具备使用、维护、调试方便,易游(中国)整体布局合理、美观。气路、控制和机器人手臂等核心部分均采用国内外知名品牌产品,性能可靠。
系统参数:
工作电源:单相三线 220V(±10%),三相交流电 380V(±15%),50Hz 工作环境:温度-10℃~+40℃,相对湿度≤85%(25℃)
整机容量:<3.0KW 外围尺寸:3m * 3m 可选配件:激光跟随器
2、监控录像系统
在安全护栏或安全房的 4 个对角上,增加摄像装置。可以远程实施监控到单元运行等实时状态,视频录像机实时对单元运行视频进行录制存贮,形成在线教材或视频教材内容;老师或管理人员可以远程监测到实时加工状态,并且可以实时指导学生教学。
二、 工作站介绍
1、工业机器人选用8Kg 负载的多用途机器人。采用 EtherCAT 总线设计的多用途机器人,运行速度快,精度高。特别适用于焊接,上下料应用。
2、焊接机
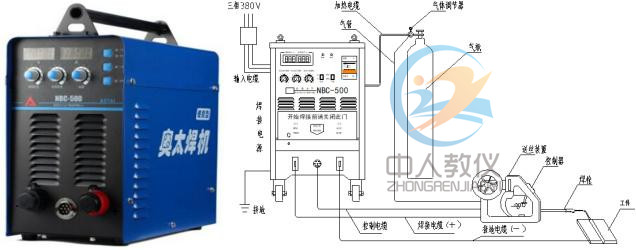
选用山东奥太的NBC-350 的机器人专有焊接机。NBC-系列逆变式 CO2 气体保护焊机是一种用于CO2 气体保护焊的高性能通用半自动电焊机。可使用Φ1.0~Φ1.6 直径实芯及药芯焊丝焊接低碳钢.低合金钢构件。该系列逆变焊机具有合理的静外特性及良好的动态性能。该系列逆变焊机性能特点如下:
1.逆变技术可以保证焊接电压在电网电压波动及电弧长度变化的情况下高度平稳,电弧自调节能力强,焊接过程稳定。
2.焊接飞溅小,金属熔敷率高。
3.焊缝成型好,焊接变形小。
4.采用强脉冲引弧,引弧成功率高。
5.收弧时具有消球功能。
6.自锁功能在大规范长焊缝焊接是时可降低焊工劳动强度。
7.送丝电路采用高稳定电源,送丝平稳。
8.送丝装置接口独立,便于拆装加长电缆。选用山东奥太的NBC-350 的机器人专有焊接机。NBC-系列逆变式 CO2 气体保护焊机是一种用于CO2 气体保护焊的高性能通用半自动电焊机。可使用Φ1.0~Φ1.6 直径实芯及药芯焊丝焊接低碳钢.低合金钢构件。该系列逆变焊机具有合理的静外特性及良好的动态性能。该系列逆变焊机性能特点如下:
1.逆变技术可以保证焊接电压在电网电压波动及电弧长度变化的情况下高度平稳,电弧自调节能力强,焊接过程稳定。
2.焊接飞溅小,金属熔敷率高。
3.焊缝成型好,焊接变形小。
4.采用强脉冲引弧,引弧成功率高。
5.收弧时具有消球功能。
6.自锁功能在大规范长焊缝焊接是时可降低焊工劳动强度。
7.送丝电路采用高稳定电源,送丝平稳。
9.体积小,重量轻,便于移动。
10.节能省电,使用费用低,对电网容量要求低。
该系列焊机的制造符合标准 GB15579.1-2004 《弧焊易游(中国)第一部分:焊接电源》。
3、弧焊工艺包
弧焊软件工艺包,具有以下特性:
1.弧焊功能包的应用,可以在示教器上显示并控制焊接参数并修改;
2.模块化的焊接程序逻辑关系,引导您快捷编程,简单易懂;
3.提供丰富的命令,例如动作命令——直线、圆弧、点对点差补、直线插补、圆弧插补、直线+摆动、圆弧+摆动差补等。可以通过界面操作,编程人员只要将相关参数填进即可,简单易学。
4.机器人控制器利用I/O 或总线与焊接电源和清枪剪丝等装置进行信号及数据交换,可采用模拟量或数字量。
5.完善的异常处理。例如,由于电源或送丝机故障,系统中断了焊接过程;在排除了故障后,可选择“继续上次焊接”功能,那么机器人会自动回到上次停止的位置继续焊接。
6.弧焊软件包中可轻松调用焊机的专家系统数据和机器人运动数据,形成样板焊缝。可根据具体情况对专家数据库的具体参数进行修改。弧焊软件工艺包,具有以下特性:
1.弧焊功能包的应用,可以在示教器上显示并控制焊接参数并修改;
2.模块化的焊接程序逻辑关系,引导您快捷编程,简单易懂;
3.提供丰富的命令,例如动作命令——直线、圆弧、点对点差补、直线插补、圆弧插补、直线+摆动、圆弧+摆动差补等。可以通过界面操作,编程人员只要将相关参数填进即可,简单易学。
4.机器人控制器利用I/O 或总线与焊接电源和清枪剪丝等装置进行信号及数据交换,可采用模拟量或数字量。
5.完善的异常处理。例如,由于电源或送丝机故障,系统中断了焊接过程;在排除了故障后,可选择“继续上次焊接”功能,那么机器人会自动回到上次停止的位置继续焊接。
4、带防撞功能的焊枪
枪体外套管是由一整块特质高钢性不锈钢通过 CNC 易游(中国)整体加工而成,非常强壮,同时和内层枪管之间留有足够空间,当配合高吸能防碰撞工作时,即使发生碰撞也不用重新校枪,机器人 TCP 点基本不变,这样就节约了大量的机器人停机维护时间。
机器人焊枪创新地采用两路保护气设计,外层通道的保护气成轴向气流,而内层通道的保护气成径向气流,在喷嘴内混合形成层流状保护。
| 冷却方式 | 双路循环水冷 |
| 暂载率 | 100% 500A(10 分钟考核周期) |
| 混合气时电流 | 370-500A |
| 焊丝直径 | 0.8-1.6mm |
| 气体消耗量 | 6L/min 起 |
| 气体导管 | 两条,用于保护气和压缩空气通路 |
| 重量 | 约为 0.70 公斤 |
|
焊枪依靠防碰撞预载弹簧实现准确定位,并带有弹簧缓冲装置及喷嘴电流检测装置,在碰撞发生时机器人立 即停止运行;由于碰撞脱离机构的屈从设计,碰撞发生后不需要对焊枪重新校验。 |
||
| 技术参数 |
|
|
| 结构 | 全机械 | |
| 轴向释放压力 (Fz): | 550N | |
| 横行释放扭矩: | 18.2Nm | |
| 触发后复位方式: | 自动 | |
| 安全开关: | 常闭型,最大 24V/1A | |
| 送丝按钮开关: | 常开型,最大 24V/1A | |
| 重复定位精度: | 在距离法兰 300 毫米处测量,偏差范围在+/-0.01 毫米内 | |
本案配备自动清枪喷油装置是由本公司自主研发、制造的高效自动化产品,该清枪剪丝由机器人联动控制,按程序设定定时清理焊枪喷嘴内焊接飞溅,并向喷嘴内部喷射硅油,避免焊接时飞溅的牢固粘附。整体保证机器人系统长时间连续无监视运转。该自动清枪剪丝装置由清枪站、剪丝机构和喷硅油单元三部分组成。其结构如下图:

1.清枪站
清枪站采用三点固定方式,将焊枪喷嘴固定于与铰刀同心位置,铰刀转动的同时上升,将喷嘴上粘附的焊渣飞溅清理干净。精确高效的清枪站用于机器人焊接。
2.剪丝机构
剪丝机构能够保证焊丝的剪切质量,并能提供最佳的焊接起弧效果和焊枪 TCP 测量的精确程度。
3.喷硅油单元
喷硅油装置采用了双喷嘴交叉喷射,使硅油能更好地到达焊枪喷嘴的内表面,确保焊渣与喷嘴不会发生死粘连,由此能有效的减少焊枪喷嘴的清理次数和延长其使用寿命。
6、变位机
选用 300Kg 级的 HB 系列高精度变位机。HB 型高精度双轴变位机,主要实现工件焊接过程的翻转和回转两轴变位动作,以便获得最佳的焊接位置。
HB 型结构,由座式翻转机构和回转机构组成,其中座式翻转机构为翻转主驱动机构,可实现工件翻转到任意位置的可靠自锁。回转机构采用交流伺服驱动,任意位置可停,也可连续转动实现环缝的焊接。
双轴变位机的翻转和回转远动均采用交流伺服电机经高精度低背隙减速器驱动(机器人外部清枪站采用三点固定方式,将焊枪喷嘴固定于与铰刀同心位置,铰刀转动的同时上升,将喷嘴上粘附的焊渣飞溅清理干净。精确高效的清枪站用于机器人焊接。
2.剪丝机构
剪丝机构能够保证焊丝的剪切质量,并能提供最佳的焊接起弧效果和焊枪 TCP 测量的精确程度。
3.喷硅油单元
喷硅油装置采用了双喷嘴交叉喷射,使硅油能更好地到达焊枪喷嘴的内表面,确保焊渣与喷嘴不会发生死粘连,由此能有效的减少焊枪喷嘴的清理次数和延长其使用寿命。
6、变位机
选用 300Kg 级的 HB 系列高精度变位机。HB 型高精度双轴变位机,主要实现工件焊接过程的翻转和回转两轴变位动作,以便获得最佳的焊接位置。
HB 型结构,由座式翻转机构和回转机构组成,其中座式翻转机构为翻转主驱动机构,可实现工件翻转到任意位置的可靠自锁。回转机构采用交流伺服驱动,任意位置可停,也可连续转动实现环缝的焊接。
轴),从而带动工件作翻转、回转动作,重复定位精度高。通过外部轴协调控制软件与机器人协调控制,作为机器人系统的第 7 轴/8 轴使用。该变位机外部轴主要包交流伺服电机、伺服包、电机电缆及外部轴控制软件等。
7、保护罩
采用深色有机玻璃,开始焊接前,通过 IO 控制气缸,把保护罩升起,防止飞溅及光线。当完成焊接时,则降下保护罩,方便观察工件。
8、轨迹学习模块
提供 2 个轨迹学习模块。平面轨迹模拟模块与空间曲线轨迹模拟模块,用于在焊接前,先练习轨迹操作功能。
三、 离线编程软件
1、软件概述
RobotBuilder 是一套功能强大的机器人离线编程仿真软件。RobotBuilder 可从 CAD 模型获取工件轨迹,优化后自动生成机器人代码。并可直接倒入目标机器人中运行,也支持目标机器人语言直接编程。从模型到执行代码一站式解决。通过集成的 3D 仿真功能,建立一个与实际环境相同的虚拟开发环境,并集成了丰富的工艺应用工具包。RobotBuilder 是一套解决机器人系统设计、仿真、离线编程的工具,能够适应各种机器人。
产品特点
1.具有离线编程功能,能够直接生成各种品牌机器人的代码。
2.支持多种格式的三维 CAD 机器人模型倒入。
3.轨迹生成可基于CAD 数据,简化轨迹生成过程,提高精度,可利用实体模型、曲面或曲线直接生成运动轨迹。
4.包含丰富的工艺应用工具包,如打磨、喷涂、焊接等。
5.包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限、节拍估算、轨迹自动调整优化等功能。
6.提供工业机器人虚拟示教器、虚拟示教、自动生成仿真运动视频。RobotBuilder 是一套功能强大的机器人离线编程仿真软件。RobotBuilder 可从 CAD 模型获取工件轨迹,优化后自动生成机器人代码。并可直接倒入目标机器人中运行,也支持目标机器人语言直接编程。从模型到执行代码一站式解决。通过集成的 3D 仿真功能,建立一个与实际环境相同的虚拟开发环境,并集成了丰富的工艺应用工具包。RobotBuilder 是一套解决机器人系统设计、仿真、离线编程的工具,能够适应各种机器人。
产品特点
1.具有离线编程功能,能够直接生成各种品牌机器人的代码。
2.支持多种格式的三维 CAD 机器人模型倒入。
3.轨迹生成可基于CAD 数据,简化轨迹生成过程,提高精度,可利用实体模型、曲面或曲线直接生成运动轨迹。
4.包含丰富的工艺应用工具包,如打磨、喷涂、焊接等。
5.包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限、节拍估算、轨迹自动调整优化等功能。
7.支持外接真实示教器,通过实际示教器,可控制虚拟机器人,增强体验感。
8.具有机器人外部轴运动,能够实现 7、8 轴的离线编程功能。
9.支持机器人的虚实同步,虚拟机器人与实际机器人同步运行。
10.支持多台机器人同时仿真,支持复杂应用。
2、示教器编程
RobotBuilder 支持外接真实示教器。通过真实示教器,可控制虚拟 3D 机器人,增强体验感。并且可以通过示教器,编程真实的机器人程序,控制虚拟的机器人本体运动。使每个学员在初期,可以大胆的练习机器人操作,而不用担心损害机器人。同时又与实际机器人相同的操作体验。
3、轨迹学习考核
在离线编程软件里,增加了轨迹学习考核功能。利用外接真实示教器,学员可以对平面轨迹仿真模块,空间曲线轨迹仿真模块,进行的轨迹操作。而软件自带的考核功能,可以评估学员的轨迹学习情况。只有达到优秀的学员,才允许操作实际的工具机器人。
4、离线编程焊接
把实际需要焊接的工件,导入到 RobotBuilder 软件里。通过离线编程功能,可提取工件的焊接轨迹吧,并在软件里仿真。通过仿真修改存在的问题,对于确认后工件运动轨迹,可生成不同品牌的机器人代码。把这些代码 copy 到实际机器人,就能完成真实的焊接。
四、实验建议
1. 机器人焊接基本技术理论及基本操作技能;2. 机器人焊接运动轨迹的优化;
3. 机器人焊接的编程操作及焊接技术参数设置;
4. 不同厚度钢材料的焊接实验;
5. 焊接机器人及焊接系统的维护与故障维修实验;
6. 焊接机器人的日常检验及保养。
7. 机器人与工件模型导入到离线编程软件;
8. 离线编程软件的机器人应用场景建立;
9. 离线编程软件的工件轨迹生成;
10. 离线编程软件的后置代码生成;
11. 离线编程软件的真实示教器编程操作;
如对本产品/文章:焊接机器人工作站实训系统,焊接机器人实训平台有任何疑问请随时易游网页版,我们将尽力为您提供最全的实训室建设方案和最优质的服务
本文关键词:焊接机器人工作站实训系统,焊接机器人实训平台
【焊接机器人工作站实训系统,焊接机器人实训平台】是上海中人原创,如果您在了解产品的过程中受到启发,想要咨询相关易游(中国)的问题,我们将派专员为您解决疑问,或者您在阅读【焊接机器人工作站实训系统,焊接机器人实训平台】中有想不通的问题,也可以咨询我们,我们将为您提供快速解决【焊接机器人工作站实训系统,焊接机器人实训平台】问题的方案
相关热词:
下一篇:机器人基础实训平台
这些是最新的
热门关键词
热门排行
