
|
|||||||
|
|||||||
|
||||||
|
||||||
|
||||||||||||
|
||||||||||||
|
|||||||||
|
|||||||||
|
|||
|
|||
|
|||||||||
|
|||||||||
|
||
|
||
|
|||||
|
|||||
|
||
|
||
|
|||
|
|||
|
|||
|
|||

上海中人专业提供【小型】扶梯模型实训考核装置,是专业的教学易游网页版,易游(中国)生产厂家,我们欢迎您来我们生产基地考察【小型】扶梯模型实训考核装置,并为您提供专业的解决方案。教学易游网页版,易游(中国)可以解决教师教学缺少平台,学生缺少实操经验的难题。【小型】扶梯模型实训考核装置,是中人公司的品质效益保障教学产品。 文章内容中的图片为参考图片,仅供参考,以实物为准.
本文关键词:【小型】扶梯模型实训考核装置
透明型推荐:/proshow.asp?ID=1085
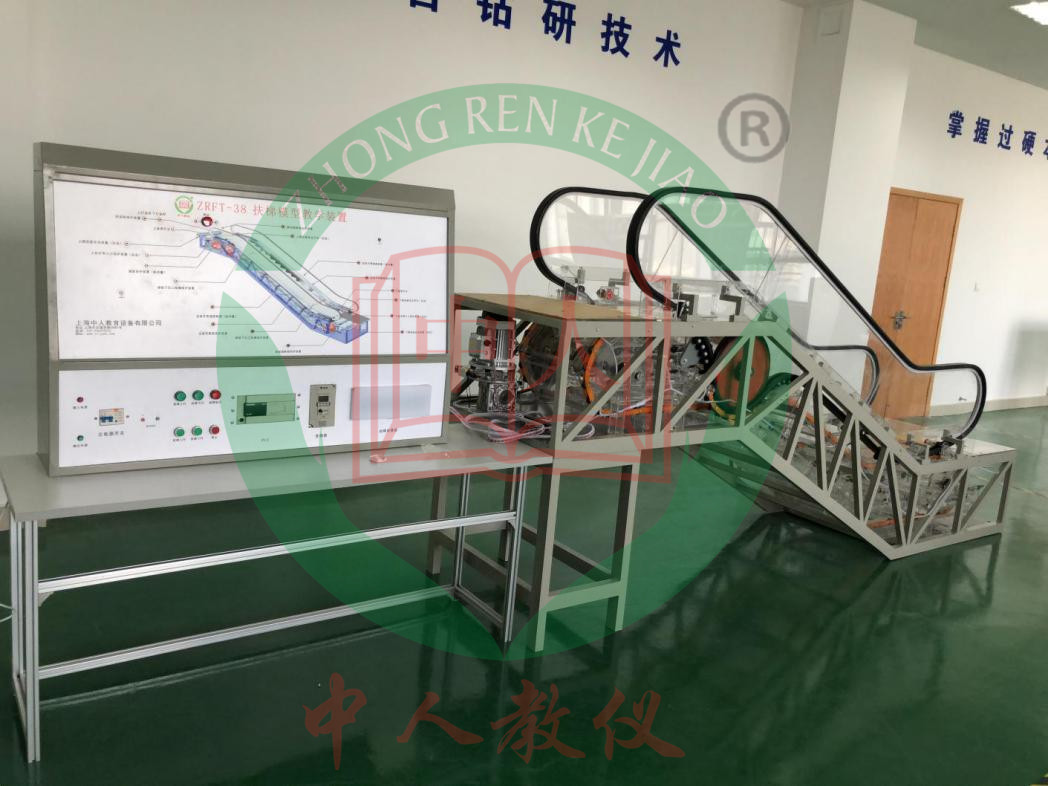

一、扶梯模型实训考核装置,教学扶梯,扶梯模拟实训装置概述
扶梯模型实训考核装置,教学扶梯,扶梯模拟实训装置按一比五的比例缩小的自动扶梯,真实的再现扶梯的状况。主要用途是让学生更深入的了解扶梯的构造、运行原理及运行状态、练习编辑扶梯控制程序、扶梯控制程序测试、练习扶梯变频节能运行的编程与操作,练习变频器的调整与故障分析,了解扶梯内安全开关动作原理与安装方法,练习扶梯各器件拆装,实验超速、欠速、防逆转电气保护原理,放逆转机械保护原理,了解扶梯出现安全事故的原因。
扶梯模型实训考核装置,教学扶梯,扶梯模拟实训装置采用交流变频调速器与PLC通过开关量进行控制。整套易游网页版,易游(中国)由一台PLC控制,变频器拖动,实现现实中的实际扶梯控制。通过它,学生可以提高扶梯的安装与调整能力,故障的检测和排除能力,还可以练习PLC编程与实验从而提高编程技能,及变频器的调整、故障排查,调试学习,事故分析。
二、扶梯模型实训考核装置,教学扶梯,扶梯模拟实训装置基本技术指标
1.电源: AC220V ±5% / AC380V±5% 50Hz
2.额定电流:5A
3.整机容量:<2kW
4.外形尺寸:整梯:长×宽×高(mm) 2000×700×1100mm
控制柜:长×宽×高(mm) 500×400×250mm
5.控制方式:可编程控制器采用西门子200系列PLC,主机为S7-226CN内置数字量I/O:24DI/16DO,中断输入:4,HSC输入:6(30kHz)支持A/B模式,脉冲输出:2(20kHz)。最大数字I/O点:128DI/128DO,执行时间(位指令):0.22us,程序存储器:24576 B,数据存储器:10240 B,存储器模块:可用,模拟量I/O:32AI/28AO最大44。网络功能:串行通讯;AS-Interface;Profibus-DP从站;模拟电话;以太网/因特网;GPRS;Modbus主站/从站。网络主站功能:Modbus RTU主站和AS-Interface主站。扩展模块为EM222,8点输出。变频器采用西门子MM420变频器,1.5KW。
6.调速方式:VVVF
7.结构形式: 单台上、下行
8.曳引机:速比40:1
9.拖动电机:型号:MJ136-5
电压:AC220V/380V 50Hz
功率:1.5KW
转速:1400 rpm
10.安全保护措施:漏电保护功能、安全性符合相关的国标标准,扶梯内全部保护开关采用DC24V弱电。
三、扶梯模型实训考核装置,教学扶梯,扶梯模拟实训装置结构
机械结构组成:
1. 井道框架:相当于扶梯附着的建筑物,为扶梯提供支承,固定扶梯行架,采用钢架结构。
2. 曳引机:位于柜架顶部上机房,是扶梯的动力易游网页版,易游(中国),安装在电引机底座上。主要由以下部分组成。
3. 电动机:鼠笼式三相感应电动机,采用变频变压(VVVF)驱动方式,扶梯起动时,变频器使定子电流频率从极低频率开始,按控制要求上升到额定频率,减速时,使转速相应从额定频率开始平滑地下降到零,保证了扶梯运行平稳,并保障扶梯的规定制动距离。
4. 制动器:只在电动机通电运转时松闸,当电动机停止时保持可靠制动,保障扶梯制动距离及制停后的位置不变,工作电压DC24V。
5. 减速箱:采用蜗轮蜗杆减速器,具有精度高、效率高、噪音低的特点。
6. 曳引齿轮:提供曳引机与驱动轴的输出力。
7. 梯级导轨:用于梯级的平滑运行与翻转。
8. 扶手带导轨:用于扶手带的正常滑动运行。
9. 驱动机构:驱动梯级循环机构的正常翻转运行,并驱动扶手带的速度方向与梯级循环机构可靠一致运行。主要由驱动主轴、驱动连、上机舱翻转行架、下机舱翻转行架。
10. 梳齿板:当梯级槽内有异物时清除,以保障人员乘坐安全及梯级的可靠使用。
11. 操纵箱:设在扶梯的上下待停区,是用钥匙及按钮等信号输入易游网页版,易游(中国)。
12. 数字显层器: 数码显示,显示当前扶梯的运行情况及故障显示。
13. 方向指示器:扶梯运行方向指示,禁行指示,停梯指示。
14. 方向锁:开关扶梯,上、下方向运行操作,检修慢车运行的点动操作,反方向停止操作。
15. 梳齿板开关:当异物卡死在梯级上梳齿板无法将其替出时开关动作保护动作停梯。
16. 梯级塌陷保护开关:梯级自身损坏,无法正常在梯级轨道内运行而脱落,保护人员安全防止人员掉入,安全回路被切断,停梯。
17. 扶手带入口保护:防止人员或异物随扶手带被带入下翻转区,或下翻转区的异物被带上来,在进出口处均设置此保护装置,断开安全回路。
18. 缓冲涨紧装置:安装在下机舱驱动机械机构涨力调整与驱动机构断连保护。
19. 扶手带:用于人员的乘梯安全与梯级同步运行,循环运行。
20. 梯级:用于承载乘客,循环运行。
21. 盘车轮:用于紧急情况或维修操作时的手动运行。
22. 编码器:提供速度信号及方向信号,输入PLC与实物进行比较可实现各速度段的超速、欠速、方向反转防逆转。
23. 手动、自动加油机构:扶梯各机械部件的保养加油。
24. 围裙板及开关:保障扶梯梯级边缘缝隙不能过大,卡住乘客的衣物等的及时保护。
25. 梯级照明灯:提示乘客注意脚下的梯级动作情况,及出入口的提醒。
26. 检修盒:提供扶梯任何位置的检修操作。
27. 语音提示装置:提示乘客在出入口的乘梯安全注意事项。
28. 静电清除机构:扶梯运行过程中的静电清除。
29. 人员检测系统:判断扶梯现有人员情况,额速、节能运行转换。
30. 机械防逆转保护系统:扶梯反方向倒溜车的机械保护,使扶梯可靠制停。
31. 蜂鸣器:提示开梯运行,反方向误入警告。
32. 次抱闸系统:利用双抱闸的同时工作可靠的使扶梯制停。
电气控制系统组成:
1. 电气控制柜:采用PLC控制器,对自动扶梯实现自动上行、下行等诸多要求的控制,电气柜安全接地,工作可靠,通过航空插头与控制对象联机,实现远程控制。
2. 漏电保护空气开关:通过检测到电气控制柜及控制对象是否具有漏电,只要有毫安级的漏电就会立即自动断开电源,保护性强。
3. 可编程序控制器(PLC):控制扶梯的运行方向状态,安全回路,测速回路,检修回路,故障报警,由比较器回路组成,开关的通断决定安全回路的正常与否,以使PLC判断扶梯安全回路是否处于安全状态。
4. 变频器:根据PLC给出的指令,对电机的运行频率、电压进行调制,使电机平衡,实现电梯的舒适可靠运行,并可实现扶梯节能运行。
5. 继电器及接触控制器:为实现弱电控制强电,通过安全的控制方式,用PLC的数字输出控制继电器、接触器等,实现电机的运行控制。
四、扶梯模型实训考核装置,教学扶梯,扶梯模拟实训装置配置
|
序号 |
名称 |
数量 |
|
1 |
扶梯上下机仓 |
1 |
|
2 |
建筑物楼层模拟系统 |
1 |
|
3 |
扶梯测速系统 |
1 |
|
4 |
抱闸控制系统 |
1 |
|
5 |
曳引机系统 |
1 |
|
6 |
显示系统 |
1 |
|
7 |
开梯控制系统 |
1 |
|
8 |
安全回路控制系统 |
1 |
|
9 |
电力拖动控制装置 |
1 |
|
10 |
加油系统 |
1 |
|
11 |
配套易损器材 |
1 |
|
12 |
配套资料 |
1 |
|
13 |
机械安全控制系统 |
1 |
|
14 |
检修控制系统 |
1 |
|
15 |
照明控制系统 |
1 |
|
16 |
控制警铃系统 |
1 |
|
17 |
语言提示系统 |
1 |
|
18 |
刷卡控制系统 |
1 |
|
19 |
检修照明系统 |
1 |
|
20 |
故障点设置系统 |
1 |
|
21 |
机械防逆转保护系统 |
1 |
|
22 |
次抱闸系统 |
1 |
|
23 |
电气控制系统 |
1 |
五、扶梯模型实训考核装置,教学扶梯,扶梯模拟实训装置产品特色
1.可编程序控制
(1)漏电保护功能、安全性符合相关的国标标准,扶梯内全部保护开关采用DC24V弱电。
(2)系统构成灵活,扩展容易,以开关量控制为其特长,可实现简单复杂控制转换。
(3)使用方便,编程简单,采用简明的梯形图、逻辑图或语句表等编程语言,而无需计算机知识,因此系统开发周期短,现场调试容易。另外,可在线修改程序,改变控制方案而不拆动硬件。
2.产品特色
(1)扶梯出入口光电检测客流情况调整节能方式运行
(2)语音提示系统提示乘客出入扶梯的安全
(3)出入梯级照明灯系统提示乘客的脚下安全
(4)编码器检测运行实际方向,速度情况,防逆转、超速、欠速保护
(5)扶梯自动加油机构
(6)显示各种故障情况状态
六、实验项目
1.PLC编程实验正常、检修、节能各种运行;
2.变频器故障显示;
3.整梯故障显示;
4.运行次数记忆;
5.超速测试实验;
6.欠速测试实验;
7.防逆转保护实验;
8.检修优先原则程序设计及实验;
9.接触器防粘连检测测试实验;
10.电气回路保护实验;
11.接触器防粘连、防卡试验;
12.语音提示安装与调试;
13.梯级拆装操作;
14.梳齿板拆装与调整;
15.变频器功能速度调试;
16.抱闸系统调试;
17.机械防逆转系统原理与实验;
18.曳引机系统拆装与调整
19.编码器的检测
20.模拟梯级的安装
21.模拟扶手带的安装
22.驱动机构调整
23.电力拖动控制原理与组装试验
24.梳齿板安装与调整
25.二次抱闸的原理及调整